
Taking the hand out of hand layup
Emerging research shows that it’s possible to automate the hand layup process.

Giving hand layup a hand up to higher volume. Researchers at Bristol University (Bristol, UK) are working on robot-centered technology designed to automate traditional hand layup of composite prepregs. If successful, it might help “hand” layup move into higher-volume end-markets and applications. Source: ACCIS/Bristol University.

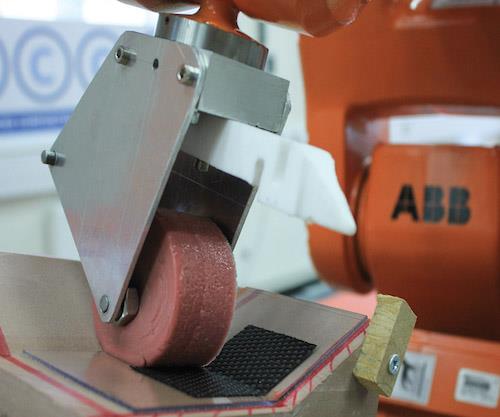
Robotic end-effectors for prepreg ply placement. The Bristol University research program developed three end-effectors for layup. This is the profiled end-effector, designed to exert pressure into tight internal corners. Two other end-effectors have been designed, respectively, for flat and double-curvature surfaces. Source: ACCIS/Bristol University



Hand layup of prepregged fiber reinforcements has long been a standard of aerospace composites fabrication processes, and this has suited OEMs and molders well, particularly given what were historically the aerospace industry’s relatively low build volumes. Further, the 100% inspection requirement imposed by aerospace OEMs ensures that any error introduced by humans during hand layup will more than likely be caught and corrected before delivery to the customer.



Marrying quality and quantity
For the mainstream automotive industry — the next great frontier for composites — the modus operandi has always rested at the polar opposite end of the fabrication spectrum. For the automaker, the hallmarks are high volume, high speed, repeatability, consistency, and quality control based on randomized part sampling, none of which favor hand layup of prepregs. All the same, the discrete placement of prepreg plies is a core advantage of composites design philosophy and not a process that the automotive industry wants to dismiss out of hand. Further, in the aerospace industry, the definition of “high-volume” is getting higher, which has put pressure on composites fabricators to be faster and more efficient in that industry as well.
Although automated fiber placement and automated tape laying (AFP and ATL, respectively) have obviously done much to automate prepreg tow, tape and fabric placement, these technologies are not cost-effective or efficient for all prepreg fiber placement operations. Each is most effective when parts are relatively simple: Large, flat or gently curved surfaces, such as wingskins come to mind. They are less so for parts with highly contoured, and/or deeply drawn surfaces, where bridging is a risk in tight radii and/or complex curvatures challenge the machinery’s capability to successfully drape materials — situations in which human digits are still more capable.
So, the question is, can you replicate the process of hand layup without the potential for error inherent in touch labor? More to the point, can you mimic the dexterity and deftness of human thumbs, fingers and palms, and in the process provide higher speeds and greater consistency? In short, can you replicate hand layup without the human hand? The short answer appears to be a qualified “yes.”
Putting potential into practice
Proof of concept is being provided, as part of the CIMComp project, by the research team of lecturer in composites design, processing and manufacture Carwyn Ward and Kevin Potter, professor of composites manufacture, with research associate Michael Elkington, at the Advanced Centre for Composites Innovation and Science (ACCIS), Department of Aerospace Engineering, at Bristol University (Bristol, UK). They reported on their work in a paper presented at SAMPE Long Beach (May 23-26, Long Beach, CA, US).
The team focused its research efforts on developing layup automation for what it called a U-shaped panel, using a metallic mold that features a raised U-shaped section with tapered sides and a recess in the center of the U. They then closely studied how layup technicians place plies. “The key focus was on how the laminators actually create in-plane deformation in the plies,” they note. “Once an area had been appropriately sheared, it was adhered to the mold surface and then the shearing of the neigh- boring areas began.”
In addition, they said, “as small regions of the ply are sheared, the surrounding regions can begin to fold or wrinkle because of the discontinuity in in-plane strain across the ply.”
To cope with such wrinkling and folding, the team’s paper notes, human laminators perform “a series of grasps and actions” to make sure each ply lays in the mold as it should, before the next ply is placed. This can be done, of course, because the laminator’s hands are guided by well-trained eyes, which can see and identify the location of wrinkles and folds as they develop. Even with today’s advanced visual technologies, that instant, symbiotic relationship would be difficult and expensive to simulate, at present, with automated robotic systems.
To address these challenges of in-plane deformation, then, the team decided to perform material shearing prior to layup, thereby minimizing the risk of wrinkling and folding. This “pre-shearing” step involves placing the ply in a press-type mechanism to form it into the approximate shape it will assume on the final part, generating at the same time the in-plane shear desired. Once plies are pre-sheared, they are ready for layup.
The researchers evaluated the possibility of using a press for this operation, but noted that control of order of ply layup is critical to ensure the quality of the contact between the epoxy in the prepreg and the mold surface. This was difficult to achieve with a press mechanism and instead they favored an automated approach that approximates the action of the human hand.
Because human laminators use their hands in so many different configurations to push prepreg into a mold, the researchers developed three end-effectors that would attach to the end of an ABB IRB 140 6-axis robot (ABB Inc. - Robotics Div., Auburn Hills, MI, US).
All three end-effectors were mounted to the same robotic attachment. “To switch between them, the head of the robot would simply re-orientate, allowing rapid changeovers,” they note.
Each end effector, fabricated from silicone, uses a different design to target specific geometric features. The cylindrical roller end effector is designed for flat, convex and mildly contoured surfaces. The “profiled” roller end effector features a sphere with a sharp ridge at the outermost point for applying pressure into tight internal corners. The wedge end-effector is for concave double- curvature geometries and applies localized high pressure.
Tests and lessons learned
After a series of trials to assess the end-effectors’ capabilities, the research team began layup of the U-shaped mold described above. The team learned during this process that some adjustments and modifications were required for effective layup:
- Prepreg tended to separate from the mold near corners, thus the robot was slowed at corner regions to promote adhesion.
- Material bridging was not uncommon and required repeated and extended laydown actions.
- Despite pre-shearing, some prepreg began to spring back on the mold. Therefore, it was decided that the highest shear areas should be placed first (this led to pre-shearing strategy changes, which also solved many problems).
When these adjustments were made, the researchers conducted three layup trials with the automated end-effectors. For each trial, three plies were pre-sheared and laid up with no visible wrinkles or bridging. The layups were cured at 125°C under 7 bar pressure for 70 minutes, followed by 60 minutes of high-temperature dwell. The layup was successful, “but there were a few resin-rich areas around the internal recess corners.” For comparison, another layup was done by hand by a laminator deemed of “intermediate” experience. This part showed similar regions of resin richness, which led the researchers to conclude that the automated method was approximately level with human performance at this early prototype stage.
Going forward, say the researchers, they would like to make improvements and progress this technology. This includes increasing layup speeds, improving mold surface tack, greater force applied by the robotic system, optimizing end effector geometry, and possibly multiple robots, although the latter, they note, will add a larger degree of complexity and cost.













.jpg;maxWidth=300;quality=90;format=webp)


Related Content

Plant tour: Joby Aviation, Marina, Calif., U.S.
As the advanced air mobility market begins to take shape, market leader Joby Aviation works to industrialize composites manufacturing for its first-generation, composites-intensive, all-electric air taxi.
Read More
The making of carbon fiber
A look at the process by which precursor becomes carbon fiber through a careful (and mostly proprietary) manipulation of temperature and tension.
Read More
Composite rebar for future infrastructure
GFRP eliminates risk of corrosion and increases durability fourfold for reinforced concrete that meets future demands as traffic, urbanization and extreme weather increase.
Read More
Thermoplastic composites welding advances for more sustainable airframes
Multiple demonstrators help various welding technologies approach TRL 6 in the quest for lighter weight, lower cost.
Read MoreRead Next

CW’s 2024 Top Shops survey offers new approach to benchmarking
Respondents that complete the survey by April 30, 2024, have the chance to be recognized as an honoree.
Read More
Composites end markets: Energy (2024)
Composites are used widely in oil/gas, wind and other renewable energy applications. Despite market challenges, growth potential and innovation for composites continue.
Read More
From the CW Archives: The tale of the thermoplastic cryotank
In 2006, guest columnist Bob Hartunian related the story of his efforts two decades prior, while at McDonnell Douglas, to develop a thermoplastic composite crytank for hydrogen storage. He learned a lot of lessons.
Read More